 |
Google OR-Tools v9.14
a fast and portable software suite for combinatorial optimization
|
|
Google OR-Tools v9.14
a fast and portable software suite for combinatorial optimization
|
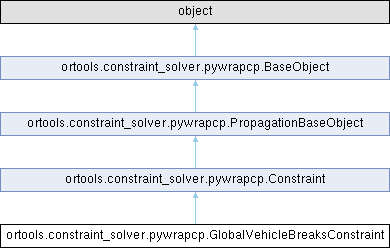
GlobalVehicleBreaksConstraint ensures breaks constraints are enforced on
all vehicles in the dimension passed to its constructor.
It is intended to be used for dimensions representing time.
A break constraint ensures break intervals fit on the route of a vehicle.
For a given vehicle, it forces break intervals to be disjoint from visit
intervals, where visit intervals start at CumulVar(node) and last for
node_visit_transit[node]. Moreover, it ensures that there is enough time
between two consecutive nodes of a route to do transit and vehicle breaks,
i.e. if Next(nodeA) = nodeB, CumulVar(nodeA) = tA and CumulVar(nodeB) = tB,
then SlackVar(nodeA) >= sum_{breaks [tA, tB)} duration(break).
Definition at line 6275 of file pywrapcp.py.
Public Member Functions | |
| __init__ (self, dimension) | |
| DebugString (self) | |
| Post (self) | |
| InitialPropagateWrapper (self) | |
| Public Member Functions inherited from ortools.constraint_solver.pywrapcp.Constraint | |
| __init__ (self, solver) | |
| Var (self) | |
| __repr__ (self) | |
| __str__ (self) | |
| __add__ (self, *args) | |
| __radd__ (self, v) | |
| __sub__ (self, *args) | |
| __rsub__ (self, v) | |
| __mul__ (self, *args) | |
| __rmul__ (self, v) | |
| __floordiv__ (self, v) | |
| __neg__ (self) | |
| __abs__ (self) | |
| Square (self) | |
| __eq__ (self, *args) | |
| __ne__ (self, *args) | |
| __ge__ (self, *args) | |
| __gt__ (self, *args) | |
| __le__ (self, *args) | |
| __lt__ (self, *args) | |
| MapTo (self, vars) | |
| IndexOf (self, *args) | |
| __disown__ (self) | |
| Public Member Functions inherited from ortools.constraint_solver.pywrapcp.PropagationBaseObject | |
| __init__ (self, s) | |
| solver (self) | |
| Name (self) | |
| __disown__ (self) | |
| Public Member Functions inherited from ortools.constraint_solver.pywrapcp.BaseObject | |
| __init__ (self) | |
| __str__ (self) | |
| __repr__ (self) | |
| __disown__ (self) | |
Properties | |
| thisown = property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc="The membership flag") | |
| Properties inherited from ortools.constraint_solver.pywrapcp.Constraint | |
| thisown = property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc="The membership flag") | |
| Properties inherited from ortools.constraint_solver.pywrapcp.PropagationBaseObject | |
| thisown = property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc="The membership flag") | |
| Properties inherited from ortools.constraint_solver.pywrapcp.BaseObject | |
| thisown = property(lambda x: x.this.own(), lambda x, v: x.this.own(v), doc="The membership flag") | |
| ortools.constraint_solver.pywrapcp.GlobalVehicleBreaksConstraint.__init__ | ( | self, | |
| dimension ) |
Definition at line 6292 of file pywrapcp.py.
| ortools.constraint_solver.pywrapcp.GlobalVehicleBreaksConstraint.DebugString | ( | self | ) |
Reimplemented from ortools.constraint_solver.pywrapcp.Constraint.
Definition at line 6295 of file pywrapcp.py.
| ortools.constraint_solver.pywrapcp.GlobalVehicleBreaksConstraint.InitialPropagateWrapper | ( | self | ) |
This method performs the initial propagation of the constraint. It is called just after the post.
Reimplemented from ortools.constraint_solver.pywrapcp.Constraint.
Definition at line 6301 of file pywrapcp.py.
| ortools.constraint_solver.pywrapcp.GlobalVehicleBreaksConstraint.Post | ( | self | ) |
This method is called when the constraint is processed by the solver. Its main usage is to attach demons to variables.
Reimplemented from ortools.constraint_solver.pywrapcp.Constraint.
Definition at line 6298 of file pywrapcp.py.
|
static |
Definition at line 6289 of file pywrapcp.py.