 |
Google OR-Tools v9.15
a fast and portable software suite for combinatorial optimization
|
|
Google OR-Tools v9.15
a fast and portable software suite for combinatorial optimization
|
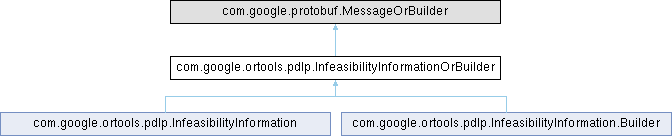
Definition at line 9 of file InfeasibilityInformationOrBuilder.java.
Public Member Functions | |
| boolean | hasMaxPrimalRayInfeasibility () |
| double | getMaxPrimalRayInfeasibility () |
| boolean | hasPrimalRayLinearObjective () |
| double | getPrimalRayLinearObjective () |
| boolean | hasPrimalRayQuadraticNorm () |
| double | getPrimalRayQuadraticNorm () |
| boolean | hasMaxDualRayInfeasibility () |
| double | getMaxDualRayInfeasibility () |
| boolean | hasDualRayObjective () |
| double | getDualRayObjective () |
| boolean | hasCandidateType () |
| com.google.ortools.pdlp.PointType | getCandidateType () |
| com.google.ortools.pdlp.PointType com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getCandidateType | ( | ) |
Type of the point used to compute the InfeasibilityInformation.
optional .operations_research.pdlp.PointType candidate_type = 6;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| double com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getDualRayObjective | ( | ) |
The objective of the linear program labeled (1) in the previous paragraph.
optional double dual_ray_objective = 5;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| double com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getMaxDualRayInfeasibility | ( | ) |
Let (y_ray, r_ray) be the algorithm's estimate of the dual and reduced cost extreme ray where (y_ray, r_ray) is a vector (satisfying the dual variable constraints) scaled such that its infinity norm is one. A simple and typical choice of y_ray is (y_ray, r_ray) = (y, r) / max(| y |_∞, | r |_∞) where y is the current dual iterate and r is the current dual reduced costs. Consider the quadratic program we are solving but with the objective (both quadratic and linear terms) set to zero. This forms a linear program (label this linear program (1)) with no objective. Take the dual of (1) and compute the maximum absolute value of the constraint error for (y_ray, r_ray) to obtain the value of max_dual_ray_infeasibility.
optional double max_dual_ray_infeasibility = 4;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| double com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getMaxPrimalRayInfeasibility | ( | ) |
Let x_ray be the algorithm's estimate of the primal extreme ray where x_ray is a vector that satisfies the sign constraints for a ray, scaled such that its infinity norm is one (the sign constraints are the variable bound constraints, with all finite bounds mapped to zero). A simple and typical choice of x_ray is x_ray = x / | x |_∞ where x is the current primal iterate projected onto the primal ray sign constraints. For this value compute the maximum absolute error in the primal linear program with the right hand side set to zero.
optional double max_primal_ray_infeasibility = 1;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| double com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getPrimalRayLinearObjective | ( | ) |
The value of the linear part of the primal objective (ignoring additive constants) evaluated at x_ray, i.e., c' * x_ray where c is the objective coefficient vector.
optional double primal_ray_linear_objective = 2;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| double com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.getPrimalRayQuadraticNorm | ( | ) |
The l_∞ norm of the vector resulting from taking the quadratic matrix from primal objective and multiplying it by the primal variables. For linear programming problems this is zero.
optional double primal_ray_quadratic_norm = 3;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasCandidateType | ( | ) |
Type of the point used to compute the InfeasibilityInformation.
optional .operations_research.pdlp.PointType candidate_type = 6;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasDualRayObjective | ( | ) |
The objective of the linear program labeled (1) in the previous paragraph.
optional double dual_ray_objective = 5;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasMaxDualRayInfeasibility | ( | ) |
Let (y_ray, r_ray) be the algorithm's estimate of the dual and reduced cost extreme ray where (y_ray, r_ray) is a vector (satisfying the dual variable constraints) scaled such that its infinity norm is one. A simple and typical choice of y_ray is (y_ray, r_ray) = (y, r) / max(| y |_∞, | r |_∞) where y is the current dual iterate and r is the current dual reduced costs. Consider the quadratic program we are solving but with the objective (both quadratic and linear terms) set to zero. This forms a linear program (label this linear program (1)) with no objective. Take the dual of (1) and compute the maximum absolute value of the constraint error for (y_ray, r_ray) to obtain the value of max_dual_ray_infeasibility.
optional double max_dual_ray_infeasibility = 4;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasMaxPrimalRayInfeasibility | ( | ) |
Let x_ray be the algorithm's estimate of the primal extreme ray where x_ray is a vector that satisfies the sign constraints for a ray, scaled such that its infinity norm is one (the sign constraints are the variable bound constraints, with all finite bounds mapped to zero). A simple and typical choice of x_ray is x_ray = x / | x |_∞ where x is the current primal iterate projected onto the primal ray sign constraints. For this value compute the maximum absolute error in the primal linear program with the right hand side set to zero.
optional double max_primal_ray_infeasibility = 1;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasPrimalRayLinearObjective | ( | ) |
The value of the linear part of the primal objective (ignoring additive constants) evaluated at x_ray, i.e., c' * x_ray where c is the objective coefficient vector.
optional double primal_ray_linear_objective = 2;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.
| boolean com.google.ortools.pdlp.InfeasibilityInformationOrBuilder.hasPrimalRayQuadraticNorm | ( | ) |
The l_∞ norm of the vector resulting from taking the quadratic matrix from primal objective and multiplying it by the primal variables. For linear programming problems this is zero.
optional double primal_ray_quadratic_norm = 3;
Implemented in com.google.ortools.pdlp.InfeasibilityInformation.Builder, and com.google.ortools.pdlp.InfeasibilityInformation.