 |
Google OR-Tools v9.15
a fast and portable software suite for combinatorial optimization
|
|
Google OR-Tools v9.15
a fast and portable software suite for combinatorial optimization
|
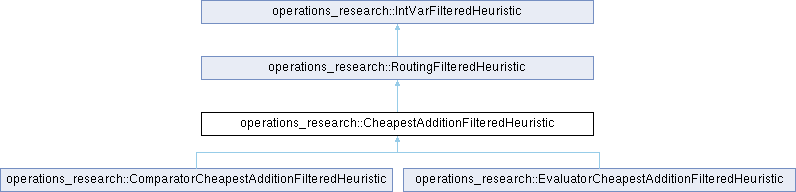
Filtered-base decision builder based on the addition heuristic, extending a path from its start node with the cheapest arc.
Definition at line 1222 of file routing_search.h.
#include <routing_search.h>
Public Member Functions | |
| CheapestAdditionFilteredHeuristic (RoutingModel *model, std::function< bool()> stop_search, LocalSearchFilterManager *filter_manager) | |
| ~CheapestAdditionFilteredHeuristic () override=default | |
| bool | BuildSolutionInternal () override |
| Virtual method to redefine how to build a solution. | |
| Public Member Functions inherited from operations_research::RoutingFilteredHeuristic | |
| RoutingFilteredHeuristic (RoutingModel *model, std::function< bool()> stop_search, LocalSearchFilterManager *filter_manager) | |
| ~RoutingFilteredHeuristic () override=default | |
| Assignment * | BuildSolutionFromRoutes (const std::function< int64_t(int64_t)> &next_accessor) |
| Builds a solution starting from the routes formed by the next accessor. | |
| RoutingModel * | model () const |
| int | GetStartChainEnd (int vehicle) const |
| Returns the end of the start chain of vehicle,. | |
| int | GetEndChainStart (int vehicle) const |
| Returns the start of the end chain of vehicle,. | |
| void | MakeDisjunctionNodesUnperformed (int64_t node) |
| void | AddUnassignedNodesToEmptyVehicles () |
| Adds all unassigned nodes to empty vehicles. | |
| bool | MakeUnassignedNodesUnperformed () |
| Make all unassigned nodes unperformed, always returns true. | |
| void | MakePartiallyPerformedPairsUnperformed () |
| Public Member Functions inherited from operations_research::IntVarFilteredHeuristic | |
| IntVarFilteredHeuristic (Solver *solver, const std::vector< IntVar * > &vars, const std::vector< IntVar * > &secondary_vars, LocalSearchFilterManager *filter_manager) | |
| virtual | ~IntVarFilteredHeuristic ()=default |
| Assignment * | BuildSolution () |
| int64_t | number_of_decisions () const |
| int64_t | number_of_rejects () const |
| virtual std::string | DebugString () const |
Additional Inherited Members | |
| Protected Member Functions inherited from operations_research::RoutingFilteredHeuristic | |
| bool | StopSearch () override |
| Returns true if the search must be stopped. | |
| virtual void | SetVehicleIndex (int64_t, int) |
| virtual void | ResetVehicleIndices () |
| bool | VehicleIsEmpty (int vehicle) const |
| void | SetNext (int64_t node, int64_t next, int vehicle) |
| Protected Member Functions inherited from operations_research::IntVarFilteredHeuristic | |
| void | ResetSolution () |
| Resets the data members for a new solution. | |
| virtual void | Initialize () |
| Initialize the heuristic; called before starting to build a new solution. | |
| std::optional< int64_t > | Evaluate (bool commit, bool ignore_upper_bound=false, bool update_upper_bound=true) |
| void | SetValue (int64_t index, int64_t value) |
| const std::vector< int > & | delta_indices () const |
| Returns the indices of the nodes currently in the insertion delta. | |
| int64_t | Value (int64_t index) const |
| bool | Contains (int64_t index) const |
| Returns true if the variable of index 'index' is in the current solution. | |
| IntVar * | Var (int64_t index) const |
| Returns the variable of index 'index'. | |
| int64_t | SecondaryVarIndex (int64_t index) const |
| Returns the index of a secondary var. | |
| bool | HasSecondaryVars () const |
| Returns true if there are secondary variables. | |
| bool | IsSecondaryVar (int64_t index) const |
| Returns true if 'index' is a secondary variable index. | |
| void | SynchronizeFilters () |
| Synchronizes filters with an assignment (the current solution). | |
| Protected Attributes inherited from operations_research::IntVarFilteredHeuristic | |
| Assignment *const | assignment_ |
| operations_research::CheapestAdditionFilteredHeuristic::CheapestAdditionFilteredHeuristic | ( | RoutingModel * | model, |
| std::function< bool()> | stop_search, | ||
| LocalSearchFilterManager * | filter_manager ) |
Definition at line 3563 of file routing_search.cc.
|
overridedefault |
|
overridevirtual |
Virtual method to redefine how to build a solution.
Implements operations_research::IntVarFilteredHeuristic.
Definition at line 3568 of file routing_search.cc.